Table of Contents
A robot arm servo is one of the most important components in robotics, responsible for precise movement control, positioning accuracy, and mechanical stability of a robotic arm. It converts electrical signals into controlled angular or linear motion, allowing the robot to perform tasks such as gripping, rotating, lifting, or assembling objects. Building or understanding how to make a robot arm servo requires knowledge of electronics, mechanical design, and control systems. In many cases, servo systems are used in educational robotics, DIY automation projects, and industrial prototypes because they offer a compact and efficient motion control solution. By learning its structure and working principles, engineers and hobbyists can better design or customize robotic systems for different applications.
Basic Components of a Robot Arm Servo
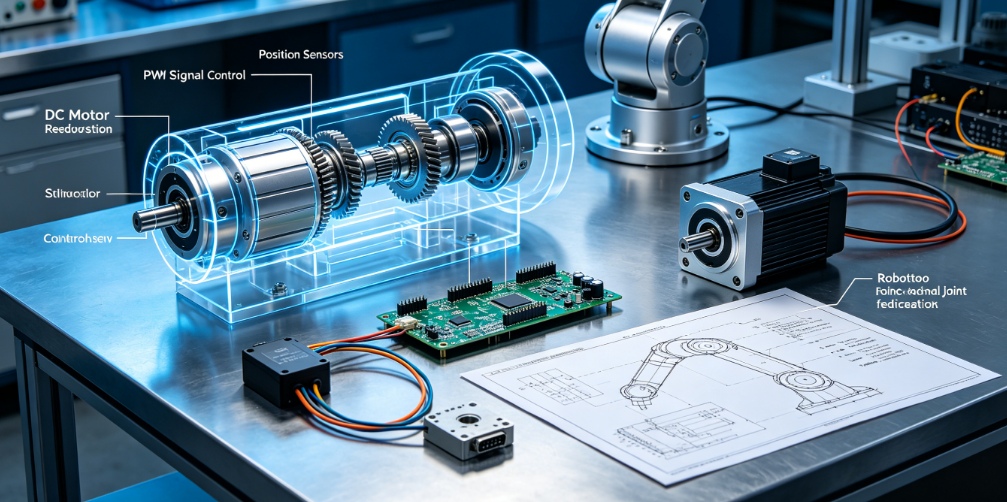
To understand how a robot arm servo is made, it is essential to break down its core internal components.
- DC motor or coreless motor
This is the driving force of the servo. It generates rotational motion when electricity is applied, forming the foundation of movement control. - Gear reduction system
A set of plastic or metal gears reduces speed while increasing torque. This allows the servo to move heavy loads with precise control instead of fast rotation. - Position sensor (potentiometer or encoder)
This component detects the current position of the output shaft and sends feedback to the control circuit, ensuring accurate movement. - Control circuit board
It interprets PWM (Pulse Width Modulation) signals and adjusts motor movement accordingly, completing the feedback loop system.
Step-by-Step Process to Build a Robot Arm Servo
Creating a functional robot arm servo involves assembling mechanical and electronic parts in a structured way.
- Assemble the motor and gear system
First, the motor is connected to a gear train that reduces speed and increases torque. Proper alignment is critical to avoid friction and energy loss. - Install the feedback sensor
A potentiometer or encoder is mounted on the output shaft to measure the rotation angle. This ensures the servo can return to precise positions. - Connect the control board
The circuit board is wired to the motor and sensor. It receives control signals and adjusts motor output based on feedback data. - Calibrate movement range
After assembly, the servo is tested to ensure it rotates within the expected angle range (usually 0°–180°), preventing mechanical damage.
Working Principle of a Robot Arm Servo System
A robot arm servo operates using a closed-loop control system that continuously adjusts its position.
- Signal input via PWM control
The servo receives pulse signals that determine the target angle. Different pulse widths correspond to different positions. - Feedback correction mechanism
The internal sensor constantly compares the actual position with the target position, making real-time adjustments. - Torque stabilization
When an external force is applied, the servo resists movement and corrects its position, maintaining stability in robotic arm operations.
Practical Applications and Design Considerations
When designing or using a robot arm servo, several practical factors must be considered to ensure performance and durability.
- Load capacity matching
The servo must be selected or designed according to the weight it will handle in the robotic arm joints. - Heat management
Continuous operation generates heat, so proper ventilation or heat-resistant materials are necessary. - Precision requirements
High-precision applications such as robotics assembly lines require servo systems with low backlash gears and high-resolution encoders. - Power efficiency
Efficient motor design reduces energy consumption and improves overall system performance.
Common Challenges in Building a Robot Arm Servo
Although building a servo system is feasible, several technical challenges may arise during development.
- Gear misalignment issues
Improper gear installation can lead to noise, vibration, and reduced efficiency. - Signal interference problems
Electrical noise may affect control signals, leading to inaccurate movement or jittering. - Wear and tear of components
Continuous operation can cause gear wear, especially in plastic gear systems. - Calibration complexity
Achieving precise feedback alignment between sensor and motor requires careful tuning.
Conclusion
A robot arm servo is a highly integrated system that combines mechanical components, electronic control, and feedback mechanisms to achieve precise motion control. By understanding its core components, assembly process, and working principles, it becomes easier to design or build a functional servo system for robotics applications. Whether used in education, DIY projects, or industrial automation, a well-built servo ensures accuracy, stability, and efficiency in robotic arm operations, making it a fundamental element in modern robotics engineering.
0